
|
|
Detalhes do produto:
|
| Nome: | Prendedor macio do dedo da série de SFG-N | Certificação: | FDA |
|---|---|---|---|
| Material: | Borracha macia do silicone da estrutura | Operação: | Pneumático |
| Tipo: | Angular | Número de maxilas: | 6-jaws |
| Aplicativo: | Para caixas de cartão | Opções: | Com o sensor integrado da força |
| Destacar: | Prendedor robótico macio clássico,Prendedor macio do robô clássico,Prendedor macio do robô da indústria alimentar |
||
Aplicações clássicas na indústria de alimentos frescos--Prendedor macio do robô da série de SFG-N
Descrição do produto
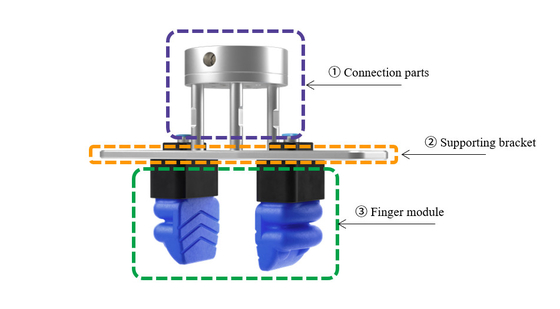
O prendedor macio do dedo de SFG é um novo tipo de prendedor flexível lançado por SRT, que é composto principalmente do módulo do dedo, do suporte e do conector flexíveis do braço mecânico. O módulo flexível do dedo é o componente do núcleo do prendedor flexível de SFG, e a parte executiva é derramada da borracha de silicone do produto comestível, que é caracterizada pela boa flexibilidade, pela vida útil longa e pela confiança alta. O projeto do teste padrão do diamante é adicionado à superfície interna do dedo, que tem a melhores fricção e resistência sob a condição do apoio duplo. O suporte e o conector são feitos da liga de alumínio de grande resistência da categoria da aviação, que é clara no peso e na elevação na força, e podem facilmente segurar várias ocasiões industriais. Pode adaptavelmente envolver o objeto do alvo sem pre ajustar-se de acordo com o tamanho, a forma e a dureza precisos do objeto. Pode obter livrada das limitações de linhas de produção tradicionais em materiais entrantes e pode segurar partes de vários tamanhos e formas.
![]()
Princípios de funcionamento
O prendedor macio tem a estrutura especial da bolsa a ar, produzindo movimentos diferentes de acordo com a diferença da pressão interna e externo.
tende a prender, auto-adaptavelmente que cobre a relação do workpiece, e terminando agarrando o movimento.
os prendedores abrem e para liberar o workpiece e terminam o agarramento de apoio interno em algumas situações específicas.
![]()
![]()
![]()
Codificando princípios
![]()
Regras da codificação do módulo do dedo
![]()
Montagem part-TC4
Tc4 é um acessório modular que coopere com a série de SFG de prendedor flexível e da conexão mecânica da máquina. O desenvolvimento rápido e a substituição rápida dos dispositivos elétricos podem ser terminados afrouxando menos parafusos.
![]()
o *The flangeia tamanho da peça da montagem do robô é compatível com os três tamanhos comuns em ISO9409-1: 200 (GB/T14468.1: 2004).
Montando o suporte deapoio
![]()
Módulo macio do dedo
![]()
![]()
Parâmetros do produto
| Modelo | N2020 | N2027 | N3025 | N3034 | N3043 | N3052 | N4036 | N4049 | N4062 | N4075 | N5041 | N5056 | N5072 | N5087 | N6047 | N6064 | |
| W/mm | 20 | 30 | 40 | 50 | 60 | ||||||||||||
| L/mm | 19,2 | 26,5 | 25 | 34 | 45 | 54 | 35,5 | 48,5 | 62,5 | 75 | 40,5 | 56 | 73 | 88 | 47 | 64 | |
| Ln/mm | 34,2 | 41,5 | 44 | 53,5 | 64 | 73 | 59,5 | 72,5 | 86,5 | 99 | 66 | 81,5 | 98,5 | 113,5 | 77,7 | 94,7 | |
| T/mm | 16 | 16,8 | 20,5 | 21,5 | 22 | 22 | 26,5 | 28 | 28,5 | 28,5 | 31,5 | 33,5 | 33,5 | 34 | 35,2 | 38 | |
| X/mm | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 0 | 0 | -0,5 | -0,5 | 1,5 | 1,5 | 0 | 0,5 | 0 | 0 | |
| A/mm | 22 | 22 | 30 | 30 | 30 | 30 | 40 | 40 | 40 | 40 | 48 | 48 | 48 | 48 | 53,5 | 53,5 | |
| B/mm | 16 | 16 | 19 | 19 | 19 | 19 | 24 | 24 | 24 | 24 | 27 | 27 | 27 | 27 | 30,5 | 30,5 | |
| Smax/mm | 5 | 10 | 6 | 15 | 23 | 30 | 9 | 19 | 25 | 37 | 12 | 20 | 36 | 46 | 18 | 31 | |
| Ymax/mm | 6 | 11,5 | 10 | 19 | 28 | 36 | 13 | 24 | 36 | 50 | 17 | 31 | 47 | 60 | 24 | 40 | |
| Weight/g | 18,9 | 20,6 | 40,8 | 44,3 | 48 | 52 | 74,4 | 85,5 | 96,5 | 105,5 | 104,3 | 121,2 | 140,8 | 157,8 | 158,1 | 186,6 | |
| Força de empurrão em fingertip/N | 4 | 3,8 | 8 | 7 | 5,6 | 4,6 | 12 | 11 | 8,5 | 7 | 19 | 17 | 13,5 | 11 | 26 | 25 | |
| Único dedo coeffic- da carga ient/g |
Vertical | 200 | 180 | 370 | 300 | 185 | 150 | 560 | 500 | 375 | 300 | 710 | 670 | 600 | 500 | 750 | 750 |
| Revestido | 290 | 300 | 480 | 500 | 380 | 300 | 690 | 710 | 580 | 570 | 1200 | 1300 | 1100 | 1000 | 1600 | 1750 | |
| Frequência de funcionamento máxima (CPM) | <300 | ||||||||||||||||
| Tempo/épocas de trabalho padrão | >3,000,000 | ||||||||||||||||
| Pressão de funcionamento/kPa | -60~100 | ||||||||||||||||
| Tubo de ar diameter/mm | 4 | 6 | |||||||||||||||
Força de impulso da única exposição do teste do dedo
![]()
Especificação material
![]()
Pessoa de Contato: Miss. wang
Telefone: +8618651125686