
|
Detalhes do produto:
|
| Peso: | 507g | ||
|---|---|---|---|
| Destacar: | Prendedor macio versátil da robótica,prendedor macio da robótica da carga 1920g,prendedor macio do robô da carga 1920g |
||
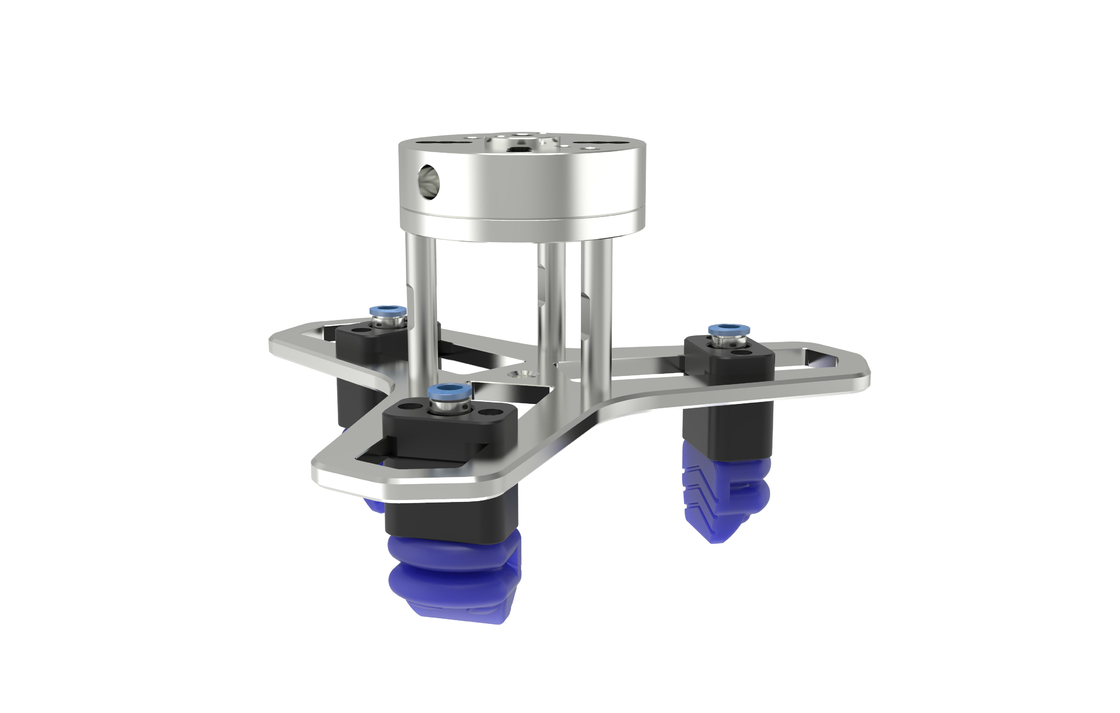
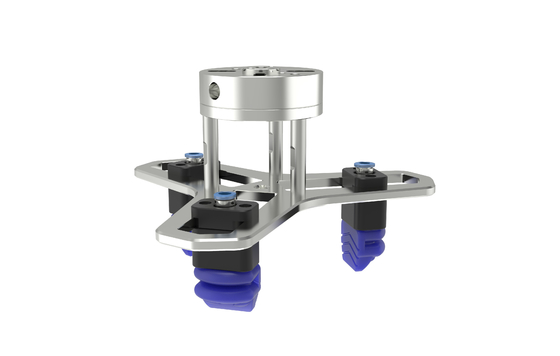
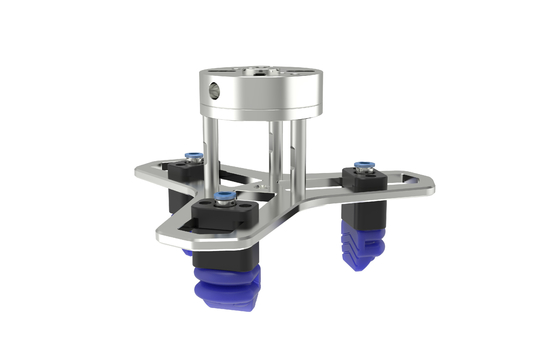
SFG-FNC3-N3025 + versatilidade + prendedor macio do robô
Prendedor macio do robô usando partículas para transferir forças
A maioria de atuadores flexíveis convencionais são conduzidos pela pressão pneumática ou hidráulica e exigem o hermeticity e uma grande bomba da movimentação. Durante a preensão, a rigidez do prendedor é esperada frequentemente aumentar com deformação aumentada, que é difícil de conseguir para os atuadores convencionais. Este papel apresenta um atuador do macio-corpo que use partículas para conduzir os prendedores, nenhuma selagem é exigido e o atuador pode ser conduzido para dobrar-se usando somente um pistão para empurrar as partículas. Nas experiências, quando o volume de partículas injetadas mudadas de 1,0 vezes o volume inicial do atuador a 1,8 vezes o volume inicial, o atuador dobrado a 60° com um aumento quase séptuplo na rigidez comparada ao estado inicial. Para verificar a possibilidade deste método, um prendedor do macio-corpo que consiste em três atuadores do macio-corpo foi desenvolvido. Este método fornece uma alternativa importante para o projeto e o desenvolvimento de prendedores flexíveis.
| φb | 200 |
| Wn | 30 |
| Dn | 31-142 |
| Libra | 68,2 |
| Lt | 62,7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| escala da dimensão do workpiece | 31-154 |
| carga (g) | 1920 |
| peso do produto (g) | 507 |
| pressão de trabalho máxima | 100kPa |
| vida do produto | 300w |
![]()
Pessoa de Contato: Miss. wang
Telefone: +8618651125686