SFG-FNC3-N5041 + controllability + prendedor macio do robô
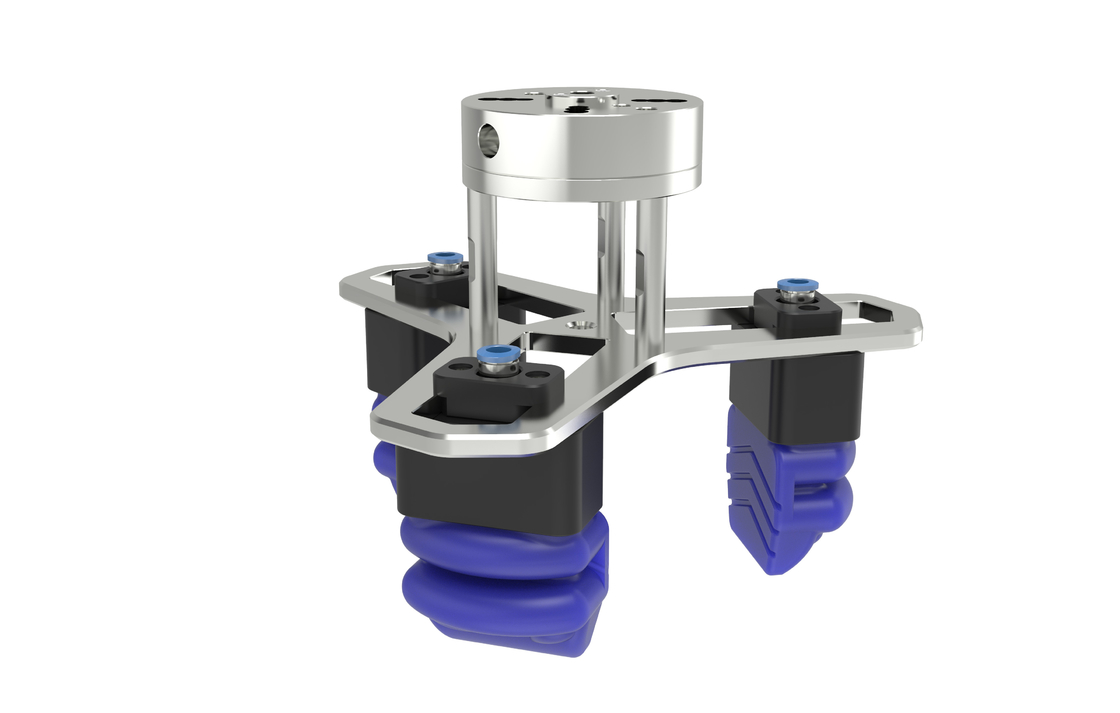
Prendedor macio do robô que pode agarrar dúzias dos objetos de formas e de tamanhos diferentes
O destaque do projeto dos dedos macios do robô é a palma móvel (poucos pesquisadores projetaram a palma do prendedor ser móveis). No papel, os pesquisadores mostram que com a palma móvel, o dedo macio do robô pode agarrar dúzias dos objetos de formas e de tamanhos diferentes e até um peso máximo de 3 quilogramas, usando somente o controle de preensão do aberto-laço. Além disso, o prendedor flexível tem a estabilidade emocionante excelente, com os objetos que permanecem prendidos firmemente sem cair quando o braço robótico se move em uma aceleração de 15m/s^2.
| φb | 200 |
| Wn | 50 |
| Dn | 28-134 |
| Libra | 68,2 |
| Lt | 62,7 |
| Ln | 66 |
| L | 40,5 |
| Smax | 12 |
| Ymax | 17 |
| escala da dimensão do workpiece | 28-158 |
| carga (g) | 3600 |
| peso do produto (g) | 633 |
| pressão de trabalho máxima | 100kPa |
| vida do produto | 300w |
![]()
Nossos produtos são vendidos em todo o mundo. Você pode ter certeza de todo o processo de nossos produtos.