
| Lugar de origem: | Pequim, China |
|---|---|
| Marca: | Soft Robot Gripper |
| Número do modelo: | SFG-FMA4-M5072 |
| Quantidade de ordem mínima: | Negociação |
| Preço: | Negotiation |
| Detalhes da embalagem: | Pacote da caixa |
| Tempo de entrega: | 2-3 dias do trabalho |
| Termos de pagamento: | L/C, D/A, D/P, T/T |
| Habilidade da fonte: | Segundo a quantidade da ordem |
| Certificação: | FDA CE ISO | Nome: | Prendedor macio do robô |
|---|---|---|---|
| Modelo: | SFG-FMA4-M5072 | Carga: | 3000G |
| Aplicação: | Indústria de automóvel, foodindustry, 3C, equipamento médico, etc. | Material: | gel de silicone da Alimento-categoria |
| Smax: | 42mm | Peso: | 902g |
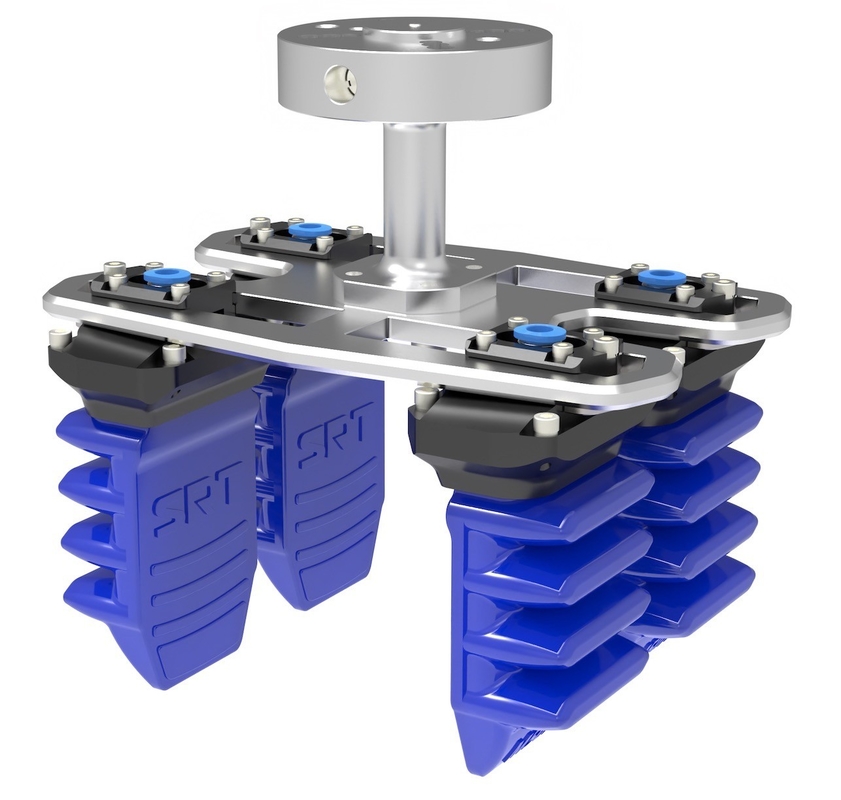
Prendedor flexível do robô - SFG-FMA4-M5072
Descrição do produto
A série de SFG de prendedores macios flexíveis do robô, [colaboração homem-máquina + preensão flexível de pouco peso] é cometida a fornecer a solução perfeita para a automatização industrial! Um dispositivo elétrico pode agarrar partes de tamanho, de forma e de peso diferentes.
| Modelo | Dimensões (milímetros) | Prendendo a capacidade | ||||||||||
| WB | Wn | Wm | HB | GN | Libra | Lt | Ln | L | Smax | Ymax |
Dn+2Smax (milímetro) |
|
| SFG-FMA4-M5072 | 111,4 | 50 | 62 | 168,7 | 52-100 | 69 | 63,5 | 93 | 72 | 42 | 51,1 | 52-184 |
Vantagem
Macio, seguro, durável, segurança alimentar
Passou FDA, CE, certificação ISO9001
Um prendedor para o problema emocionante complexo
Perito pequeno pesado da manipulação de carga
Para não danificar o empacotamento do produto e os índices para dentro
Operações da picareta e do lugar nos muitos produção industrial
Automatize com o prendedor macio do robô de SRT
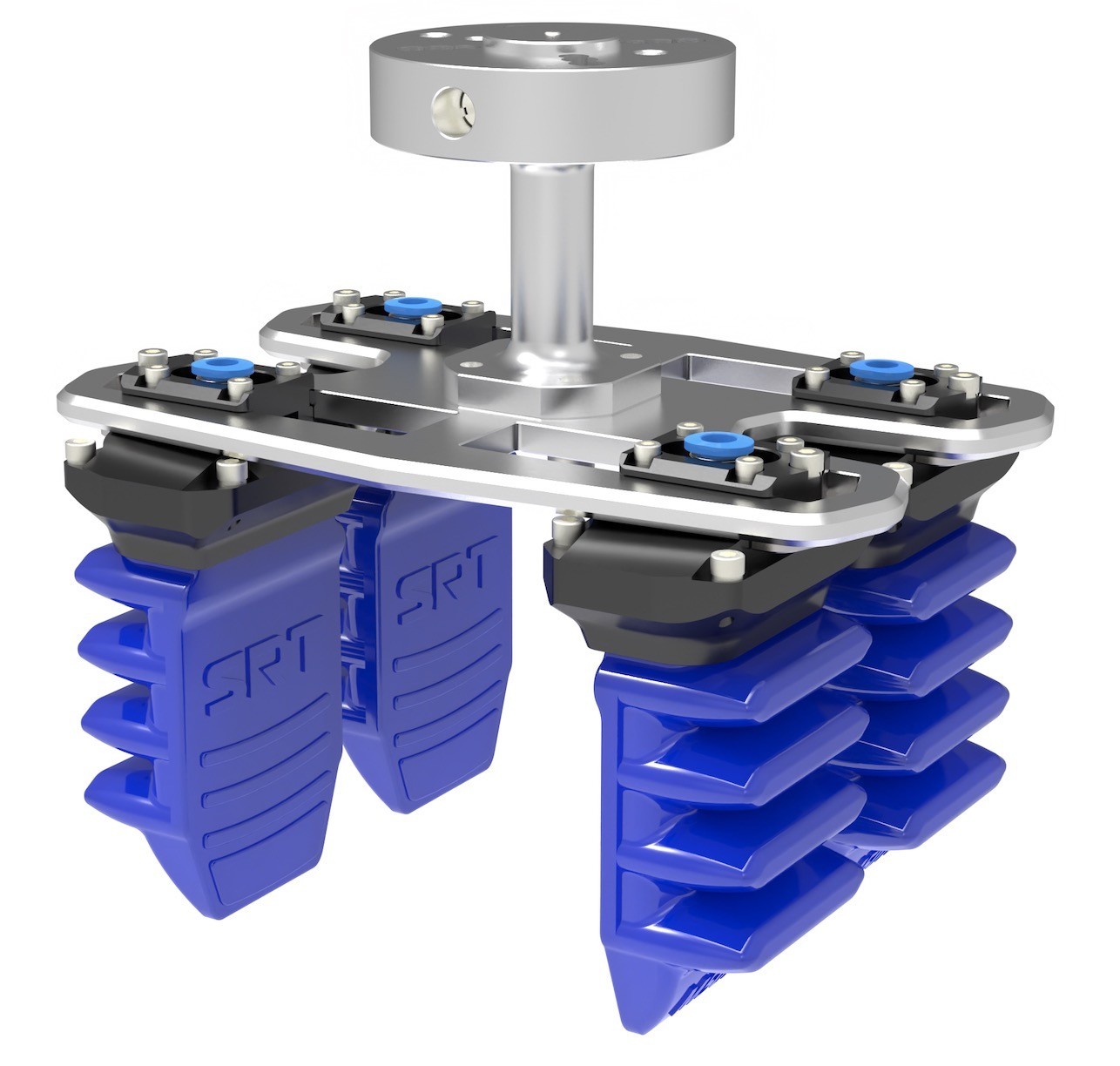
Detalhe do produto
Tempo de trabalho padrão: épocas ≥3,000,000
Carga: 3000g
Pressão de trabalho máxima: kPa 100
Diâmetro do tubo de ar: 6 milímetros
Peso: 902g
![]()
Aplicações
O prendedor flexível de SRT tem os vários modelos, visando formas diferentes, tamanhos e pesos, lançou soluções visadas:
1. Bola-como e os objetos lisos devem escolher prendedores distribuídos circulares. Os objetos longos e magros devem selecionar distributedgrippers simétricos.
2. Os objetos menores devem selecionar prendedores apertados com dedos curtos. Uns objetos mais grandes devem selecionar prendedores ajustáveis com dedos mais longos.
3. Uns objetos mais claros podem selecionar prendedores pequenos com menos dedos. Uns objetos mais pesados podem selecionar prendedores grandes com mais dedos.
![]()